






 |
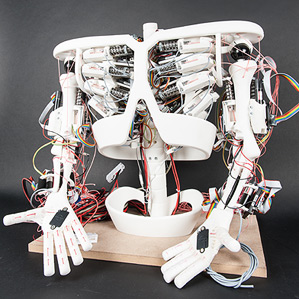
| El torso de Roboy, un nuevo robot impulsado por tendones desarrollado en la Universidad de Zurich, revela su funcionamiento interno. |
Los robots por lo general tienen un aspecto rígido y no humano, con articulaciones poco elásticas que pueden hacer que sus movimientos sean menos predecibles y más difíciles de controlar. Roboy, un robot desarrollado por Rolf Pfeifer y sus colegas en el Laboratorio de Inteligencia Artificial de la Universidad de Zurich, es un ejemplo de un enfoque distinto y que poco a poco está ganando impulso.
Roboy tiene una forma humana con 1,22 metros de altura y un conjunto de 'músculos' inspirados en el sistema musculoesquelético humano. Los músculos de plástico trabajan en conjunto gracias a motores eléctricos y tendones artificiales. Los sistemas impulsados por tendones como el de Roboy imitan los mecanismos flexibles de la biología, y podrían dar lugar a una nueva clase de robots que sean más ligeros, más seguros y se muevan de una manera más natural.
"Si solo te interesa hacer un cierto tipo de trabajo, como un determinado movimiento o algo así, entonces puedes usar los métodos tradicionales basados en motores o articulaciones", afirma Pfeifer, que dirige el laboratorio de AI en Zurich. "Si te interesa un tipo de movimiento más natural, tienes que explorar la tecnología basada en tendones".
Imitar el movimiento humano resulta ideal para un robot que esté diseñado para asumir tareas humanas (ver "Atlas, el robot diseñado para ser un héroe"). Pero estos robots también pueden ayudar a los investigadores a explorar en qué modo la biomecánica podría dar lugar a un comportamiento más inteligente, un campo conocido como inteligencia o cognición encarnada. "La mayoría de la gente sabe que la inteligencia necesita el cuerpo, pero no sabe por qué", señala Pfeifer. "Creo que [Roboy] puede ser una plataforma de investigación muy interesante para el aprendizaje en sistemas con muchos grados de libertad".
Roboy está lejos de ser el primer robot impulsado por tendones. Un ejemplo anterior esKenshiro, un robot que la Universidad de Tokio dio a conocer el año pasado. Kenshiro es un poco más grande que Roboy, con 160 músculos tipo polea, así como huesos de aluminio, que le permiten doblarse y adoptar poses sencillas. El equipo responsable de Kenshiro colaboró aconsejando al equipo de Pfeifer.
Una empresa alemana llamada Bionic Robonics ofrece un sistema impulsado por tendones para uso industrial. El brazo robótico de esta empresa, BioRob, tiene una estructura mecánica flexible que le permite recoger cargas pesadas, a pesar de que su peso es mucho menor que el de un brazo de robótico convencional que la compañía también fabrica. El diseño ligero y flexible de BioRob también hace que sea más seguro de usar junto a trabajadores humanos. "El brazo responde muy bien a las órdenes, y permite hacer movimientos muy rápidos y precisos", asegura Oskar von Stryk, uno de los ingenieros del brazo robótico.
Uno de los obstáculos más grandes para los ingenieros de dispositivos impulsados por tendones es encontrar una forma de modelar efectivamente los complejos movimientos del cuerpo humano. Pero también es difícil asegurar que los robots puedan posicionarse a sí mismos con precisión, porque los tendones son propensos a aflojarse y estirarse. "La calibración de los tendones es un reto para la investigación en IA", explica Sisir Karumanchi, postdoctorado en el Grupo de Movilidad Robótica del Instituto Tecnológico de Massachusetts (MIT, en EE.UU.). Los ingenieros a menudo lo compensan con sensores adicionales.
El equipo de Pfeifer ya está trabajando en la próxima versión de Roboy, que será más grande y tendrá muchos más sensores de movimiento. A pesar de que el Roboy actual no puede caminar, el equipo espera lograr que camine haciendo que la mitad superior del cuerpo sea más ligero, así como mediante el uso diseños con más muelles. También planean hacer que el diseño de Roboy sea de código abierto, lo que permitiría a cualquier persona con una impresora 3D construir y jugar con su propia versión. MIT
Roboy tiene una forma humana con 1,22 metros de altura y un conjunto de 'músculos' inspirados en el sistema musculoesquelético humano. Los músculos de plástico trabajan en conjunto gracias a motores eléctricos y tendones artificiales. Los sistemas impulsados por tendones como el de Roboy imitan los mecanismos flexibles de la biología, y podrían dar lugar a una nueva clase de robots que sean más ligeros, más seguros y se muevan de una manera más natural.
"Si solo te interesa hacer un cierto tipo de trabajo, como un determinado movimiento o algo así, entonces puedes usar los métodos tradicionales basados en motores o articulaciones", afirma Pfeifer, que dirige el laboratorio de AI en Zurich. "Si te interesa un tipo de movimiento más natural, tienes que explorar la tecnología basada en tendones".
Imitar el movimiento humano resulta ideal para un robot que esté diseñado para asumir tareas humanas (ver "Atlas, el robot diseñado para ser un héroe"). Pero estos robots también pueden ayudar a los investigadores a explorar en qué modo la biomecánica podría dar lugar a un comportamiento más inteligente, un campo conocido como inteligencia o cognición encarnada. "La mayoría de la gente sabe que la inteligencia necesita el cuerpo, pero no sabe por qué", señala Pfeifer. "Creo que [Roboy] puede ser una plataforma de investigación muy interesante para el aprendizaje en sistemas con muchos grados de libertad".
Roboy está lejos de ser el primer robot impulsado por tendones. Un ejemplo anterior esKenshiro, un robot que la Universidad de Tokio dio a conocer el año pasado. Kenshiro es un poco más grande que Roboy, con 160 músculos tipo polea, así como huesos de aluminio, que le permiten doblarse y adoptar poses sencillas. El equipo responsable de Kenshiro colaboró aconsejando al equipo de Pfeifer.
Una empresa alemana llamada Bionic Robonics ofrece un sistema impulsado por tendones para uso industrial. El brazo robótico de esta empresa, BioRob, tiene una estructura mecánica flexible que le permite recoger cargas pesadas, a pesar de que su peso es mucho menor que el de un brazo de robótico convencional que la compañía también fabrica. El diseño ligero y flexible de BioRob también hace que sea más seguro de usar junto a trabajadores humanos. "El brazo responde muy bien a las órdenes, y permite hacer movimientos muy rápidos y precisos", asegura Oskar von Stryk, uno de los ingenieros del brazo robótico.
Uno de los obstáculos más grandes para los ingenieros de dispositivos impulsados por tendones es encontrar una forma de modelar efectivamente los complejos movimientos del cuerpo humano. Pero también es difícil asegurar que los robots puedan posicionarse a sí mismos con precisión, porque los tendones son propensos a aflojarse y estirarse. "La calibración de los tendones es un reto para la investigación en IA", explica Sisir Karumanchi, postdoctorado en el Grupo de Movilidad Robótica del Instituto Tecnológico de Massachusetts (MIT, en EE.UU.). Los ingenieros a menudo lo compensan con sensores adicionales.
El equipo de Pfeifer ya está trabajando en la próxima versión de Roboy, que será más grande y tendrá muchos más sensores de movimiento. A pesar de que el Roboy actual no puede caminar, el equipo espera lograr que camine haciendo que la mitad superior del cuerpo sea más ligero, así como mediante el uso diseños con más muelles. También planean hacer que el diseño de Roboy sea de código abierto, lo que permitiría a cualquier persona con una impresora 3D construir y jugar con su propia versión. MIT


No hay comentarios:
Publicar un comentario